JuliaCall: Integrating R and Julia
Author: Hans W. Borchers, Duale Hochschule BW, Mannheim
Date: June 20, 2023
Contents
- Introduction
- Using JuliaCall
- Computing with JuliaCall
- Loading datasets
- Plotting functionality
- Application examples
- Differential equations
- Optimization and JuMP
Introduction
Installing Julia
We assume the user has installed a newer version of R, such as R >= 4.3.1 (2023-06-16), and knows how to install R packages. Besides that, the user shall install Julia by himself. The latest stable version is Julia 1.9.1 (as of June 7, 2023) and can be downloaded from the Julia language home page julialang.org for the major operating systems Windows, macOS, and Linux.
Some Julia packages will be needed. Though the julia_setup routine tries to install the necessary packages, it might be preferable to download and install some packages directly from Julia, and before Julia is called the first time from R.
> julia
_ _ _(_)_ | Documentation: https://docs.julialang.org
(_) | (_) (_) |
_ _ _| |_ __ _ | Type "?" for help, "]?" for Pkg help.
| | | | | | |/ _` | |
| | |_| | | | (_| | | Version 1.9.1 (2023-06-07)
_/ |\__'_|_|_|\__'_| | Official https://julialang.org/ release
|__/ |
julia>
After loading the Pkg package with using Pkg, the command Pkg.add() will download and install Julia packages (in the .julia subdirectory of your home directory) once, and using <pkg> will load these into the active session, just like library() in R. For instance, RCall will enable Julia to call R routines or get access to R objects.
To be used, Pkg itself needs to be loaded with using Pkg, and then type Pkg.add("RCall"). It is easier to apply the ‘]’ operator that will change the console mode to accept package commands. This mode will be left by pressing the <del> key.
julia> ]
(@v1.8) pkg> add RCall
## Updating ...
(@v1.8) pkg> <del>
julia> using RCall
julia> ...
There is also a help mode that can be raised by typing the question mark ?. (This works in ‘package mode’ as well, that is with ‘pkg> ?’.)
Installing JuliaCall
JuliaCall is an R package, available on CRAN, by Changcheng Li. We would recommend to always install the newest version of JuliaCall from Github. The devtools R package provides the install_github() routine to do that for us if we know the name of the Github repository.
# devtools::install_github("Non-Contradiction/JuliaCall")
# JuliaCall | Version 0.17.5 (2022-09-08) | MIT + file LICENSE
library(JuliaCall)
julia_setup()
This only works if the julia command is defined in your path. The path, e.g., to a different Julia version can be added to julia_setup() as an option or argument. The following code starts a Julia installation at a different location.
options(JULIA_HOME = "~/Programs/julia-1.8.5/bin/")
julia_setup()
## Julia version 1.8.5 at location ~/Programs/julia-1.8.5/bin will be used.
## Loading setup script for JuliaCall...
## Finish loading setup script for JuliaCall.
# or
# julia_setup(JULIA_HOME = "~/Programs/julia-1.8.5/bin/")
All commands in JuliaCall start with a julia_ prefix. It is also possible to call these commands with a jl$ prefix by assigning the setup command to the variable jl (or any other valid name) with jl <- julia_setup() – if the user prefers that kind of style.
Using JuliaCall
Basic JuliaCall Commands
To check whether Julia is working from R, type in a simple command such as calling the Julia square root funtion on 2.0 by applying julia_call().
julia_call("sqrt", 2.0)
## [1] 1.414214
Here the Julia square root function sqrt is applied to the number 2.0. The argument is taken from R and converted to a Julia object, a number in this case, before applying the square root. The value is returned to R as an R object and can be assigned to a variable. In this variant, no values or variables are generated in Julia.
To execute a Julia command use julia_command. It can run a series of Julia commands, separated by semicolons and will, or will not, print the last Julia output, depending on whether a semicolon is appended to the last command, or not.
julia_command("a = sqrt(2.0)")
## [1] 1.4142135623730951
julia_command("a = sqrt(2.0);") # no output printed
The Julia variable a will be generated and the Julia output of the last command will be printed on the console. To completely suppress the output, append a semicolon. julia_command does not return a value to R – more to the point, NULL is returned invisibly.
To get the value of a Julia variable back to R, use the julia_eval command. It will convert the value or Julia object to an R object and print it or assign it to an R variable.
julia_eval("a = sqrt(2.0)")
## [1] 1.414214
You can apply julia_eval on a sequence of Julia expression, separating commands with semicolons ;. The value of the last command will be returned, whether there is a semicolon at the end or not.
(To explain this subtle difference in other words: julia_command will print the Julia output and return nothing, julia_eval will return and print the result as an R object.)
Finally, there is julia_assign, another useful operator. It takes an R object like a number, vector, matrix, etc., turns it into a Julia object and assigns a variable name to it. This variable can then be used in subsequent Julia commands.
julia_assign("gamma", 0.57721566490153286)
julia_command("bitstring(gamma)")
## "0011111111100010011110001000110011111100011011111011011000011001"
In Julia, this will assign to the variable name gamma the value of the Euler-Mascheroni or Gamma constant. Function bitstring prints the “literal bit representation” of gamma as a number in Julia.
A note about variable names: It is convenient to give an assigned variable the same name in R as in Julia. There is no danger that these two variables will interfere as they exist in different environments. We will largely follow this policy here.
The Julia Console
It is possible to start the Julia REPL within R with the julia_console() command. The variable a is still available.
julia_console()
## It seems that you are not in the terminal.
## A simple julia console will be started.
## Type exit and then enter to exit.
julia> a^2
2.0000000000000004
julia> e = exp(1);
julia> <cntrl-D>
Exiting Julia console.
Exit with <cntrl-D> returns control to the R command. Note again that in Julia the output of a command such as e = exp(1) is suppressed by appending a semicolon (as in MATLAB or Octave). e still exists and can be used in R.
julia_exists("e")
[1] TRUE
e <- julia_eval("e")
e
## [1] 2.718282
The julia_console functionality is especially useful when you have some knowledge about programming in Julia. Writing Julia code is much easier in this environment, and when exiting the results are still available in R.
Julia Packages
The user can start Julia and install and load packages. After restarting R and the JuliaCall library, these packages are available. It is also possible to install and load Julia libraries with JuliaCall functions.
# julia_install_package("Optim") # julia> Pkg.add("Optim")
# julia_install_package_if_needed("Optim")
julia_installed_package("Optim") # Optim version number
## [1] "1.7.4" # latest update 2022
julia_library("Optim") # julia> using Optim
The julia_library() command will load an installed package, that is, in Julia the command using Optim will be initiated. (Note that all Julia package names start with a capital letter.)
Be prepared that this may take its time as loading libraries may be slow in Julia, especially if the package is newly installed and has to be precompiled (JIT compilation).
Some packages worth looking at are:
- Plots for visualization and data analysis;
- DifferentialEquations with high-performance solvers for differential equations;
- Zygote or Enzyme providing Automatic Differentiation (AD) in Julia;
- JuMP, a modeling language for mathematical optimization;
- Image, an image processing library;
- GLM for generalized and linear models; or
- DataFrames for working with tabular data.
The GR package provides a framework, based on the “Grammar of Graphics”, for visualisation applications. Several packages exist for deep learning (Mocha, Flux, Knet, MXNet, TensorFlow, etc.). See the Julia Packages for some of the highest-ranked packages, listed by categories.
Getting Help
To get help for a Julia function use julia_help(). The quality of help in Julia is quite diverse, some functions have virtually no documentation (yet), others are documented quite well. The result of julia_help("sqrt") is
sqrt(x)
Return $\sqrt{x}$. Throws [`DomainError`](@ref) for negative [`Real`](@ref) arguments.
Use complex negative arguments instead.
The prefix operator `\sqrt` is equivalent to `sqrt`.
...
This explains that sqrt(-1) will result in an error in Julia (NA in R). The imaginary unit in Julia is im so the correct call will be
julia_eval("sqrt(-1+0im)")
## [1] 0+1i
The Julia complex number 1im has been converted to the R representation 1i. (In Julia an expression “a number times a variable” 5*x can also be written as shorthand 5x.)
In general, reading help for Julia functions through the julia_help() interface is not recommended as some of the formatting is lost and the help is difficult to read. Instead, read the newest documentation on docs.julialang.org, or open a terminal where Julia runs and look at the help page there.
Computing With JuliaCall
Numbers, Vectors, Matrices
We have already seen simple commands for interacting between R and Julia. julia_eval() and julia_command() evaluate a string containing a correct Julia expression and return the result to R. julia_call() accepts a Julia function name as string plus R variables and returns the result when applying the function in Julia. And julia_assign converts an R object and makes it accessible to Julia functions.
set.seed(1001)
A <- matrix(runif(9), 3, 3)
julia_assign("a", A) # assign a Julia name to an R variable
julia_exists("a") # variable 'a' exists in Julia
## TRUE
julia_call("typeof", a) # what is the type of object 'a'?
## Julia Object of type DataType.
## Float64
julia_eval("det(a)")
## [1] 0.01609354
Numbers in R like 1 or 1.0 are floating point and will be converted with julia_assign() to floating point numbers in Julia. If a Julia function requires natural numbers as arguments, think of defining them in R with the ‘L’ notation.
For instance, generate 10 random numbers with
julia_call("rand", 10L)
## [1] 0.8045609 ...
while julia_call("rand", 10) will throw an error – with quite a long error message. Again, julia_eval("rand(10)") would be okay, as in Julia 10 is an integer and not equal to the floating-point number 10.0.
Vectors and matrices in R are transformed to vectors and matrices of the same length and dimension in Julia. We will solve a system of linear equations in Julia, taking vector and matrix from R. For simplicity, take the same variable names in R and Julia.
A <- matrix(c(1.5,2,-4, 2,-1,-3, -4,-3,5), 3, 3, byrow = TRUE)
b <- c(1, 2, 3)
julia_assign("A", A) # same var names in R and Julia
julia_assign("b", b)
julia_command("x = A\\b;") # solve the system with `\`
julia_eval("x")
## [1] -1.739130 -1.108696 -1.456522
We apply the \ operator in Julia that solves the linear system, the same as in MATLAB. Backslash being the escape character, we have to double it in a string.
Julia Functions
Of course, all the common mathematical functions are available in Julia, like trigonometric or exponential functions or logarithms, etc.
julia_eval("sin(pi/2)")
## [1] 1
We have to be careful about applying Julia functions to vectors (or matrices, etc.) because these functions are not vectorized by default. Instead, we can use the dot notation of Julia. If f is a function, then for a vector x the expression f.(x) will broacast the function over the vector, that is apply it to each element of the vector and generate a vector of results.
julia_command("x = [0, pi/4, pi/2, pi];")
julia_eval("sin(x)")
## Error: Error happens in Julia.
## MethodError: no method matching sin(::Array{Float64,1})
julia_eval("sin.(x)")
[1] 0.000000e+00 7.071068e-01 1.000000e+00 1.224647e-16
Here we use the Julia notation for explicitly generating a vector with [...], a MATLAB-like notation, corresponding to R’s c(...). By the way, applying sin. with julia_call to an R vector will act in a vectorized way.
julia_call("sin.", c(0, pi/4, pi/2, pi))
[1] 0.000000e+00 7.071068e-01 1.000000e+00 1.224647e-16
The julia_assign() lets you also associate Julia names with R functions, that is functions in Base R or packages, or user-defined functions. As an example, we will define the Runge function in R and integrate that function with a Julia integration routine.
fRunge = function(x) 1 / (1 + (5*x)^2)
integrate(fRunge, -1, 1)
## 0.5493603 with absolute error < 2.1e-06
To make this function callable in Julia we have to tell Julia where to find and how to call the R function. Let us give it the same variable name fRunge, that is
julia_assign("fRunge", fRunge)
julia_call("fRunge", c(-1, -0-5, 0, 0.5, 1))
## [1] 0.03846154 0.13793103 1.00000000 0.13793103 0.03846154
julia_eval("fRunge([-1.0, -0.5, 0, 0.5, 1.0])")
## [1] 0.03846154 0.13793103 1.00000000 0.13793103 0.03846154
Surprisingly, as a Julia function jlRunge is vectorized, we can apply it to vectors without involving the ‘dot’ notation. The reason is that behind the scenes we are calling an R function that is vectorized. (But applying the ‘dot’ notation would also deliver the correct result.)
We want to integrate this function applying the Gauss-Kronrod integration routine in Julia. For this the QuadGK package is needed (and needs to be installed).
# julia_install_package("QuadGK")
julia_library("QuadGK")
julia_command("I, err = quadgk(jlRunge, -1, 1);")
julia_eval("[I, err]")
## [1] 5.493603e-01 1.058539e-09
(Besides, I, err = ... is an example of “multiple return values”, a concept taken from Python.)
We could have defined the Runge function in Julia directly. As a function it is a one-liner, a shorthand notation for such cases is available in Julia by simply formulating it in its mathematical form f(x) = ....
julia_command("runge(x) = 1 / (1 + (5*x)^2)")
## runge (generic function with 1 method)
One note of caution. Our new function runge is not vectorized: Applying it to a vector [-1.0, -0.5, 0, 0.5, 1.0] will raise a MethodError.
Now we can integrate it as a pure Julia function (Integration routines in Julia do not request the integrand to be vectorized.)
julia_command("I, err = quadgk(runge, -1, 1)")
## (0.5493603067780064, 1.0585390480821744e-9)
Functions without an associated variable names, so-called ‘anonymous functions’, are defined with the -> operator, similar to one-liner functions. Instead of defining runge, integrate it as an anonymous function.
julia_command("I, err = quadgk(x -> 1/(1 + (5*x)^2), -1, 1)")
## (0.5493603067780064, 1.0585390480821744e-9)
Function definition in Julia can be quite elaborated and has many options (like keywords, type definitions for function input and output, etc.). The two possible syntaxes described in this section are often sufficient for getting computational results back in R.
More Function Magic
Imagine there is a file miscellaneous.jl in the working directory that contains the following definition of a function in Julia. This agm function calculates the algebraic-geometric mean of two numbers a and b.
function agm(a, b; tol = 1.0e-15)
a0 = a; b0 = b
while abs(b0-a0) >= tol
a0, b0 = (a0 + b0)/2.0, sqrt(a0 * b0)
end
return (a0 + b0) / 2.0
end
(The argument tol after the semicolon is actually a keyword argument and will be treated slightly different. The arguments before the semicolon, whether they have default values or not, have to be provided in the sequence they are seen in the function definition.)
With julia_source() we can source this file in to Julia. Julia will JIT-compile it and make it available for the user.
julia_source("miscellaneous.jl")
julia_exists("agm")
[1] TRUE
For instance, 1/agm(1, sqrt(2.0) is the so-called Gauss constant and has an important relation to elliptic integrals.
G = 1 / julia_call("agm", 1.0, sqrt(2.0))
print(G, digits=16)
## [1] 0.8346268416740731
# Or
julia_command("1.0 / agm(1.0, sqrt(2.0); tol = 1e-12)")
0.8346268416740731
(The keyword argument tol cannot be provided with julia_call as the semicolon would stop the R command.)
The agm function, calculated through an iteration, is not vectorized, that is the expression agm(1, [0.5, 1.0, 1.5] will not work out. Julia will tell us “no method matching agm(::Int64, ::Array{Float64,1})”. Instead, we can use the dot notation of Julia.
julia_command("agm.(1, [0.5, 1.0, 1.5])")
## 3-element Array{Float64,1}:
## 0.7283955155234534
## 1.0
## 1.237340218118152
Julia provides the ability to do calculations with multi-precision numbers, based on the MPFR software program, which is also used by R’s Rmpfr and gmp packages. Our agm function accepts these Bigfloat numbers as it only employs arithmetical operations.
julia_command("b1 = BigFloat(1.0); b2 = BigFloat(2.0);")
julia_command("G = 1 / agm(b1, sqrt(b2), tol = 1e-50)")
## 0.8346268416740731862814297327990468089939
## 930134903470024498273701036819927095195
About 50 digits of this expression shall be correct. The question remains how these digits can be saved for further treatment in R. Assigning it to an R variable will loose those digits when converting to 64-bit floats.
Loading datasets
Retrieve R datasets
Many datasets known from R Base and packages are available through the RDatasets package in Julia. Most of the standard datasets in Base R as well as those included with popular R packages are available.
RDatasets.packages() will show a table of R packages considered, and RDatasets.datasets() a table of the 700+ datasets included. The prefix RDatasets is needed as these functions are not exported (but dataset is).
Pass in RDatasets.datasets("HSAUR") to receive a targeted table for the HSAUR package (first edition).
julia_command("using DataFrames, RDatasets") # julia_library(...)
julia_command('planets = dataset("HSAUR", "planets");')
julia_command('typeof(planets)')
## DataFrame
julia_command('head(planets)')
6×3 DataFrame
│ Row │ Mass │ Period │ Eccen │
│ │ Float64 │ Float64 │ Float64 │
├─────┼─────────┼─────────┼─────────┤
│ 1 │ 0.12 │ 4.95 │ 0.0 │
│ 2 │ 0.197 │ 3.971 │ 0.0 │
│ 3 │ 0.21 │ 44.28 │ 0.34 │
│ 4 │ 0.22 │ 75.8 │ 0.28 │
│ 5 │ 0.23 │ 6.403 │ 0.08 │
│ 6 │ 0.25 │ 3.024 │ 0.02 │
CVS Files
To read CSV files into Julia we utilize the CSV package.
julia_command('using CSV, DataFrames')
julia_command('glass_csv = CSV.File("glass.csv");')
julia_command('typeof(glass_csv)')
## CSV.File{false}
The return type/class of CSV.File() is not a data frame, so we still have to convert it with the help of the DataFrames package. Here we also introduce the pipe-operator of Julia.
julia_command('glass_df = glass_csv |> DataFrame;')
julia_command('typeof(glass_df)')
## DataFrame
Transfering dataframes
To transfer the ‘glass’ data to R we simple use the julia_eval() function.
glass <- julia_eval("glass_df")
class(glass)
## "data.frame"
head(glass)
row RI Na Mg Al Si K Ca Ba Fe Type
1 1 1.52101 13.64 4.49 1.10 71.78 0.06 8.75 0 0.00 1
2 2 1.51761 13.89 3.60 1.36 72.73 0.48 7.83 0 0.00 1
3 3 1.51618 13.53 3.55 1.54 72.99 0.39 7.78 0 0.00 1
4 4 1.51766 13.21 3.69 1.29 72.61 0.57 8.22 0 0.00 1
5 5 1.51742 13.27 3.62 1.24 73.08 0.55 8.07 0 0.00 1
6 6 1.51596 12.79 3.61 1.62 72.97 0.64 8.07 0 0.26 1
And vice versa, to make an R dataframe be known in Julia we would use
julia_assign("glass", glass). The glass variable in Julia then points to the data structure in R and can be handled as a DataFrame in Julia.
Plotting Functionality
Using the ‘Plots’ package
At the moment the behavior of Julia plotting routines through JuliaCall appears to be slightly different for the operating systems Windows, macOs, and Linux. I will shortly describe the Linux case. All this may not work for you if you are working with RStudio.
We will utilize the Julia Plots package that integrates several plotting packages under one common API. We have to prepare:
julia_command('ENV["GKSwstype"] = "gksqt"')
# plotsViewer()
julia_command("using Plots")
julia_command("gr()") # or: gr(), plotly(), pyplot()
The plotsViewer() function should tell Julia to do two things for plots: the first is to save the image to some temporary place, and the second is to use R’s or the operating system’s browser to view the image. [Unfortunately, at the moment it is not working correctly on macOS.]
Note that the julia_command('ENV["GKSwstype"]="gksqt";') activates the GKS QT backend, and may or may not be necessary. If it is necessary, it needs to be executed before loading the plotting library to take effect.
julia_command("Plots.plot(Plots.fakedata(50,4),w=3)")
# julia_command("gui()")
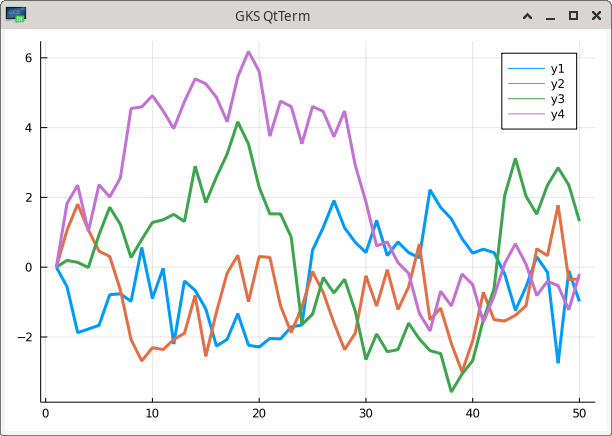
This uses the GR framework that is the default backend and can be reinstantiated with gr(). If no window pops up or is rendered in RStudio’s viewer panel, the command gui() should open an external plotting window.
The plotly() backend (see Plotly) may be easier to handle as it will open the plot in a browser of the operating system. Also pyplot() (see PyPlot) works quite well and renders in the viewer pane.
(See Backends for more ‘backends’.)
The ‘Grammar of Graphics’
The package Gadfly implements ‘Grammar of Graphics’ plotting functionality for Julia, quite similar to what ggplot2 does for R.
A Hybrid Approach
A sometimes more convenient way to plot functions or display images is to leave the heavy computation to Julia, retrieve the calculated values or coordinates to R, and do the plotting with R’s plot functions. This may be especially appropriate if the figure shall be rendered in the plots pane of RStudio.
Application examples
Linear Algebra
The Moler matrix is a symmetric matrix with exactly one very small eigenvalue. It is well suited for testing eigenvalue computations. In R a Moler matrix of size nxn can be generated through the pracma function moler(n). Let’s try to find out its small eigenvalue for dimension n=100.
M <- pracma::moler(100)
M
## [,1] [,2] [,3] [,4] [,5] [,6] [,7] [,8] [,9] [,10] ...
## [1,] 1 -1 -1 -1 -1 -1 -1 -1 -1 -1 ...
## [2,] -1 2 0 0 0 0 0 0 0 0 ...
## [3,] -1 0 3 1 1 1 1 1 1 1 ...
## ...
## [100,] -1 0 1 2 3 4 5 6 7 8 ...
( e <- eigen(M)$values )
## [1] 3.934277e+03 4.390118e+02 1.593905e+02 8.235182e+01 ...
## [97] 2.250558e+00 2.250248e+00 2.250062e+00 5.473381e-14
This last small eigenvalue is certainly incorrect – but how much? Knowing that the determinant of a Moler matrix is 1 and assuming all the bigger eigenvalues are calculated correctly, an estimate for the smallest eigenvalue would be
print(1.0/prod(e[1:99]), digits=16)
## [1] 5.600713750073471e-60
Changing M with Rmpfr to a high-precision object does not help, as eigen() does not recognize multiple precision numbers. But also Julia’s eigvals() function does not work with “big” numbers, it returns the same eigenvalues as above.
Instead, we make use of the function with the same name from the GenericLinearAlgebra Julia package. First we assign the Julia variable M to our matrix M in R, then convert it to a matrix of “big” numbers and apply the eigenvalue function.
julia_command("using GenericLinearAlgebra;")
julia_assign("M", M)
julia_command("e = eigvals(Hermitian(big.(M)));")
julia_command("println(e[1])")
## 5.60071375007503416508581022876389348658607158043730...e-60
This is really a small eigenvalue, especially compared to the other eigenvalues of this matrix. We can see that the estimated eigenvalue above (knowing the determinant of the Moler matrix) was exact up to 12 digits.
Nonlinear Regression
The following example is a well-known test example for nonlinear regression. The goal is to adapt the parameters of a model function to given data in a ‘sum-of-squares’ meaning.
The radioactive radiation of a sample containing three different radioactive decay products is measured. The aim is to determine the half-lives and thus to uncover the different substances in the probe.
# Lanczos1 data (artificial data)
# f(x) = 0.0951*exp(-x) + 0.8607*exp(-3*x) + 1.5576*exp(-5*x)
x <- seq(0, 1.15, length.out = 24)
y <- c(2.51340000, 2.04433337, 1.66840444, 1.36641802, 1.12323249, 0.92688972,
0.76793386, 0.63887755, 0.53378353, 0.44793636, 0.37758479, 0.31973932,
0.27201308, 0.23249655, 0.19965895, 0.17227041, 0.14934057, 0.13007002,
0.11381193, 0.10004156, 0.08833209, 0.07833544, 0.06976694, 0.06239313)
For the data see Figure 3 below.
We want to solve this using a Julia implementation of the Levenberg-Marquardt algorithm, available in the Julia package ‘LsqFit’.
julia_library("LsqFit") # using LsqFit
julia_assign("x", x)
julia_assign("y", y)
julia_assign("p0", c(1.0, 1.0, 1.0, 1.0, 1.0, 1.0))
The measurement data are now known within the Julia sub-process. We create the functional model (the sum of three independent decay functions) in Julia and call the nonlinear fitting procedure.
julia_command(
"@. model(x, p) = p[1]*exp(-p[2]*x) + p[3]*exp(-p[4]*x) + p[5]*exp(-p[6]*x);")
julia_command("fit = curve_fit(model, x, y, p0);")
p = julia_eval("fit.param")
[1] 0.86069977 2.99999779 1.55760080 4.99999966 0.09509943 0.99999658
We see the half lives in p[c(2,4,6)] are about 3, 5, and 1.
The data and the fitted model curve are shown in the following figure.
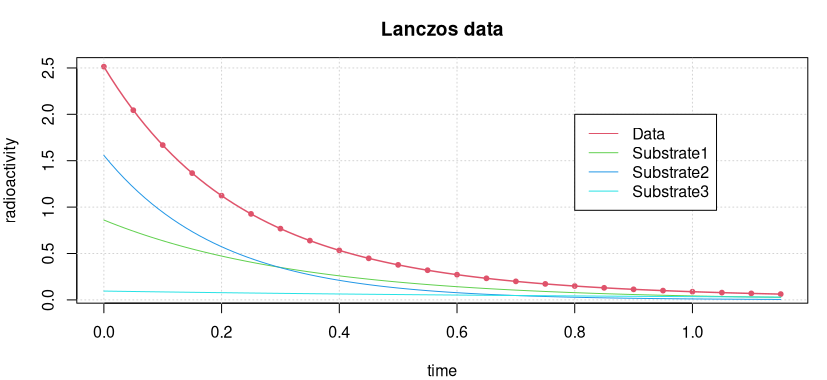
How good the accuracy of this solution is can best be seen by calculating the “sum of squares” of the residuals.
sum((p[1]*exp(-p[2]*x) + p[3]*exp(-p[4]*x) + p[5]*exp(-p[6]*x) - y)^2)
[1] 1.230944e-16
This is reasonably good and probably cannot be improved in “double float” arithmetic. However, NIST requires an accuracy of 1e-24 !
Automatic Differentiation
Automatic Differentiation is a “technique to numerically compute the derivative of a function specified by a computer program”. Julia provides several approaches (forward, backward, …) to automatic differentiation. Of course, these approaches cannot be applied to functions not defined in Julia or C functions integrated into Julia.
When we define a, maybe simple, function in R, then we can use this functionality in Julia and return results to R. As an example we will compute the exact hessian (within 64-bit floating point arithmetic) of the Rosenbrock function. For this we need to define this test function in Julia (by converting some R code).
julia_command("# Rosenbrock function in Julia
function rosen(x::Vector)
local n = length(x); local s = 0.0
for i = 1:length(x)-1
s += 100*(x[i+1] - x[i]^2)^2 + (x[i] - 1)^2
end
return s
end")
## rosen (generic function with 1 method)
We want to calculate the exact Hessian at $x = (0.95, 0.95, 0.95, 0.95)$ applying automatic forward differentiation. This is available as function hessian in the ForwardDiff package. Note that this package does not export its functions by intention, so we need to use the longer form ForwardDiff.hessian.
julia_installed_package("ForwardDiff")
## [1] "0.5.0"
julia_library("ForwardDiff")
H1 = julia_eval("ForwardDiff.hessian(rosen, 0.95*ones(4));")
H1
## [,1] [,2] [,3] [,4]
## [1,] 705 -380 0 0
## [2,] -380 905 -380 0
## [3,] 0 -380 905 -380
## [4,] 0 0 -380 200
Let us compare this with the Hessian computed in R using the finite-difference approach such as in numDeriv. Actually, numDeriv refines the finite-difference result by applying a Richardson extrapolation, thus should be quite exact.
fn = adagio::fnRosenbrock
H2 = numDeriv::hessian(fn, rep(0.95, 4))
H2
## [,1] [,2] [,3] [,4]
##[1,] 7.050000e+02 -3.800000e+02 2.57614e-14 -5.973871e-13
##[2,] -3.800000e+02 9.050000e+02 -3.80000e+02 7.168344e-14
##[3,] 2.576140e-14 -3.800000e+02 9.05000e+02 -3.800000e+02
##[4,] -5.973871e-13 7.168344e-14 -3.80000e+02 2.000000e+02
The maximum deviation here is smaller than 1e-11, but still we see that automatic differentiation returns an exact result within floating-point arithmetic.
Special Functions
There are many special mathematical and physical functions that are not available in R, but have implementations in Julia. Other such special functions are present in R, but do not have sufficient accuracy (exactness in floating-point arithmetic). If such a special function is needed in high accuracy, Julia may come to help.
For example, R has no function to call the Gamma function for complex numbers, but Julia has.
z8 = exp(2*pi*1i/8)^(1:8)
julia_assign("z8j", z8)
julia_eval("gamma.(z8j)")
## [1] 6.212488e-01-4.261265e-01i -1.549498e-01-4.980157e-01i
## [3] -8.098552e-01+3.963701e-01i 0.000000e+00+2.251800e+15i
## [5] -8.098552e-01-3.963701e-01i -1.549498e-01+4.980157e-01i
## [7] 6.212488e-01+4.261265e-01i 1.000000e+00+0.000000e+00i
This computes the Gamma function on all eighth roots of unity.
NB: The R package pracma contains function gammaz that also calculates the Gamma function for complex numbers. The Julia version is slightly more accurate.
The Julia package Combinatorics provides many interesting numbers such as factorials, Fibonacci or Lucas numbers, etc. Because these numbers grow (almost) exponentially all these numbers are returned as BigFloats. To get them at least as strings in R, call the Julia string function on them.
julia_library("Combinatorics")
julia_command("N = Combinatorics.fibonaccinum(101);")
N = julia_eval("string(N)")
N
[1] "573147844013817084101"
Here we compute the 101th Fibonacci number. This number is too big to be representable as an integer in R, therefore we return it as a string. With the gmp R package we can convert this number into a big integer and find its prime factors.
require(gmp)
factorize(as.bigz(N))
## Big Integer ('bigz') object of length 2:
## [1] 743519377 770857978613
Of course, factorization can also be done in Julia after loading the Primes package, with julia_eval("factor(BigInt(N))").
Differential Equations
The ‘diffeqr’ Package
Julia is extremely strong in the area of Differential Equations (DE), due mostly to Chris Rakaukas and his DifferentialEquations package. Its documentation is almost a textbook on all types of differential equations, and is recommended to all people interested in solving differential equations numerically.
One could apply JuliaCall to solve differential equations through this interface. Instead Chris has provided the R package diffeqr that makes use of JuliaCall, but provides a nicer way of solving differential equations by employing the Julia package. When getting installed, this package imports JuliaCall anyway. Precompiling the package may take a few moments.
# library(diffeqr)
de <- diffeqr::diffeq_setup()
ODEs (Ordinary DEs)
To solve a differential equation y' = f(t,y) one has to define the function f, an initial condition y0, and a time span [t0, te] to solve over. The result will be a vector (or matrix) of function values y at certain time points t in the interval.
We will look at a simple example. The following equation y' = y^2 - y^3 describes the flaring of a spark until it burns in a stable flame. y^3 is the volume in which oxygen gets burnt, and y^2 is proportional to the surface through which new oxygen can flow into the flame.
f <- function(u, p, t) p[1]*u^2 - p[2]*u^3
p <- c(1.0, 2.0)
u0 <- 1/250 # initializing flare, in cm
tspan <- c(0.0, 500) # time span in milliseconds
# Define and solve the DE problem
prob <- de$ODEProblem(f, u0, tspan, p)
sol <- de$solve(prob, de$Tsit5(), reltol = 1e-08,
saveat=seq(0, 500, by=2.5))
Here p is a (set of) parameter(s) to adapt the defining function f to different situations. In de$ODEProblem it can be left off, in f not, but need not be used in the function body.
Now we can plot the solution (in R). The time (the independent variable) is stored in sol$t, the dependent values in sol$u (and always named u).
par(mar=c(2,2,2,1))
plot(sol$t, sol$u, type='l', col=2, lwd=2,
main = "Flaring of a spark into a burning flame")
grid()
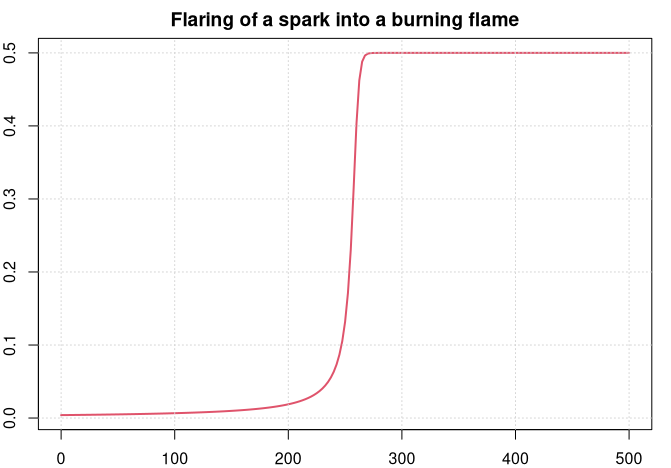
We can see how the spark develops for some time before it burst suddenly into a flame and gets stable within a very short time period.
saveat tells the solver, at which points to return solution values. For more information, for instance about how to involve reltol and abstol, see the vignettes of the diffeqr package. Tsit5 is the default solver for non-stiff ODE problems, for stiff problems the Rosenbrock23 solver is recommended.
For a list of solvers see the ODE solvers page of the DifferentialEquations documentation. A selected solver like Tsit5 will be called with sol = de$solve(prob,de$Tsit5()).
Systems of Equations
The Lotka-Volterra equations attempt to describe the dynamics of biological systems in which two species interact, one as a predator and the other as prey. It is assumed that the habitat is largely isolated.
The model consists of two intermingled differential equations of first order.
y1' = p1 * y1 + p2 * y1 * y2
y2' = p3 * y2 + p4 * y1 * y2
Here y1 is the number of prey (‘rabbits’), y2 the number of predators (‘foxes’). The coefficients characterize the interaction between the two species. For instance, p3 should be negative as the predator will die out if there is no prey.
We define a function that returns the two derivatives:
f <- function(u, p, t) {
du1 <- p[1] * u[1] + p[2] * u[1] * u[2]
du2 <- p[3] * u[2] + p[4] * u[1] * u[2]
return( c(du1, du2) )
}
with parameters p1, ..., p4 and time span [0, 240] (of weeks or months, for example) and an initial population of y0 <- c(50, 15) (in thousands, say).
# p1 <- 0.1; p2 <- -0.01
# p3 <- -0.05; p4 <- 0.001
p <- c(0.1, -0.01, -0.05, 0.001)
u0 <- c(50, 15)
tspan <- c(0, 240)
We assign the time point at which a solution shall be returned (to make the plotted function smoother) and call Julia’s Differential Equation solver as before.
t <- seq(0, 240, by=2)
prob <- de$ODEProblem(f, u0, tspan, p)
sol <- de$solve(prob, rel.tol = 1e-08, saveat = t)
# Convert Julia object into an R matrix
y <- sapply(sol$u,identity)
For systems of equations the solution is returned as an array of arrays. We convert it into an R matrix with rows representing the time series solving the problem.
par(mar=c(4, 2, 2, 1))
plot(0, 0, type = 'n', xlim = c(0, 250), ylim = c(0, 100),
xlab = 'time', ylab = '',
main = 'Solution to Lotka-Volterra equations')
grid()
lines(t, y[1, ], col = 3, lwd = 1.5)
lines(t, y[2, ], col = 2, lwd = 1.5)
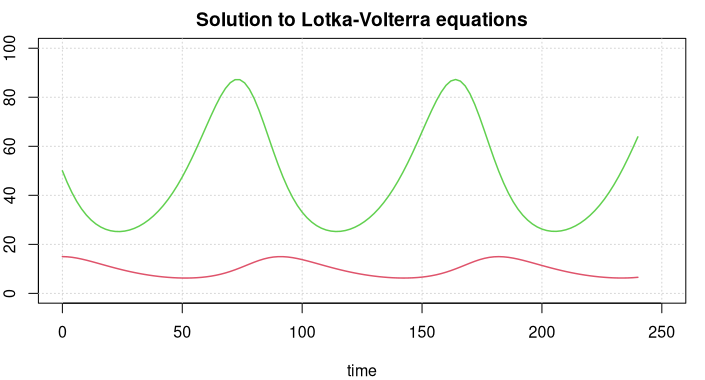
The green line displays prey figures, the red line the predators. Both species develop in a periodic way, but the curves are not sine curves, actually they cannot be represented through elementary mathematical functions.
Second-order Differential Equations
Differential Equations of second order, y'' = f(t, y, y'), cannot be solved directly, instead we solve them as a system of two first order equations with y1 = y, y2 = y', rewritng the above equation as
y1' = y2
y2' = f(t, y1, y2)
As an example, we look at a (mathematical) pendulum. Newtonian Physics tell us that the pendulum swings according to the equation
u'' = -g/L * sin(u)
where g is the gravity acceleration (on earth), L the length of the pendulum, and u the elongation from the vertical direction.
g <- 9.81 # [m/s^2]
L <- 1.0 # [m]
Following the ‘trick’ above function f looks as
f <- function(u, p, t) {
du1 <- u[2] # u1' = u' = u2
du2 <- -g/L * sin(u[1]) # u2' = u'' = -g/L sin(u)
return( c(du1, du2) )
}
We solve this system as we did before. Start with an elongation of 45 degrees (and no velocity) and observe for 10 seconds.
u0 <- c(pi/4, 0)
tspan <- c(0, 10)
t <- seq(0, 10, length = 100)
prob <- de$ODEProblem(f, u0, tspan)
sol <- de$solve(prob, rel.tol = 1e-08, saveat = t)
# Convert Julia object into an R matrix
y <- sapply(sol$u,identity)
u <- y[1, ] # elongation
v <- y[2, ] # angular velocity
par(mar = c(3,2,2,1))
plot(t, u, type = 'l', col = 4, lwd = 1.5,
main = "Pendulum (accurate and approximated)")
lines(t, pi/4 * sin(sqrt(g/L)*t + pi/2), lty = 2)
grid()
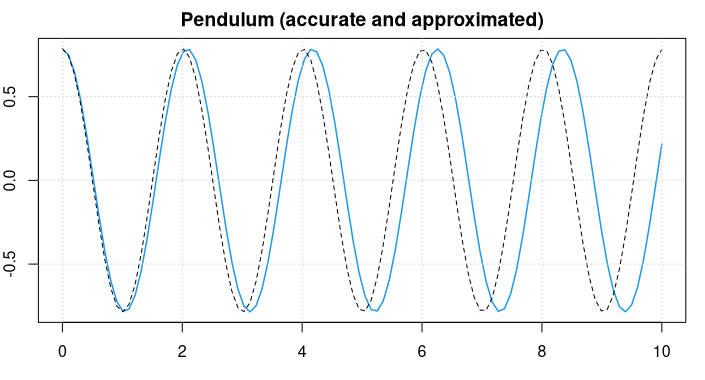
The pendulum swings back-and-forth with a frequency of about 2 seconds.
For small values of u it holds that approximately sin(u) = u and the differential equation reduces to u'' = -g/L * u, and we know the symbolic solution u = sin(c1*t + c2) . Considering the starting conditions, the approximate solution will be
u = pi/4 * sin(sqrt(g/L) * t + pi/2) .
This is plotted as a black, dotted line in the figure above.
We can see that the approximate solution is oscillating slightly faster.
Optimization and JuMP
The ‘Optim’ package
Minimize the Rosenbrock function in 10 dimensions. This test function is, e.g., defined in the adagio package, together with its exact gradient function. The starting point shall be $x0 = (0.01, \ldots , 0.01)$.
fn = adagio::fnRosenbrock
gr = adagio::grRosenbrock
In Base R we would employ the standard optim() solver with one of the methods “Nelder-Mead”, “BFGS”, or “L-BFGS-B”.
x0 = rep(0.01, 10)
sol = optim(x0, fn, gr, method="BFGS",
control=list(reltol=1e-10, maxit=1000))
sol
## $par
## [1] 1 1 1 1 1 1 1 1 1 1
##
## $value
## [1] 1.998483e-24
## ...
Instead we now employ the optimize() function in Julia, available in its Optim package that we have already loaded. First, we make fnRosenbrock available in Julia.
julia_assign("fn", fn)
julia_assign("gr", gr)
julia_call("fn", rep(0, 10)) # is 'fn' known in Julia?
## [1] 9
julia_command("result = optimize(fn, zeros(10), BFGS())")
## Results of Optimization Algorithm
## * Algorithm: BFGS
## * Starting Point: [0.0,0.0,0.0,0.0,0.0,0.0,0.0,0.0,0.0,0.0]
## * Minimizer: [0.9999999999096328,0.9999999998570117, ...]
## * Minimum: 1.634017e-16
## * Iterations: 64
## * Convergence: true
## * |x - x'| < 1.0e-32: false
## |x - x'| = 3.24e-11
## * |f(x) - f(x')| / |f(x)| < 1.0e-32: false
## |f(x) - f(x')| / |f(x)| = NaN
## * |g(x)| < 1.0e-08: true
## |g(x)| = 6.12e-10
## * stopped by an increasing objective: false
## * Reached Maximum Number of Iterations: false
## * Objective Calls: 160
## * Gradient Calls: 160
With appending a semicolon ‘;’ we can suppress the output.
julia_command("result = optimize(fn, zeros(10), LBFGS());")
xmin = julia_eval("result.minimizer")
xmin
## [1] 1 1 1 1 1 1 1 1 1 1
Because no gradient is supplied, the gradient is automatically computed applying the central-difference formula. Most of the time this is sufficient for getting good results.
Using ‘JuMP’ and ‘Ipopt’
Task: Minimize the Rosenbrock function in 10 dimensions with constraints 0 <= x[i] <= 0.5.
First we load the necessary packages and define the optimization model m with Ipopt as solver.
julia_library("JuMP")
julia_library("Ipopt")
julia_command("m = Model(solver = IpoptSolver())")
## Feasibility problem with:
## * 0 linear constraints
## * 0 variables
## Solver is Ipopt
Next we have to redefine Rosenbrock with variable arguments when we want to apply the JuMP modeling language.
julia_command("# Rosenbrock function
function rosen(x...)
local n = length(x); local s = 0.0
for i = 1:length(x)-1
s += 100*(x[i+1] - x[i]^2)^2 + (x[i] - 1)^2
end
return s
end
")
## rosen (generic function with 1 method)
The variables with bound constraints and starting values $x_i = 0.1$ are defined and initiated.
julia_command("@variable(m, 0.0 <= x[1:10] <= 0.5);")
julia_command("for i in 1:10 setvalue(x[i], 0.1); end")
Register the objective function and set it as target function for the solver.
julia_command("JuMP.register(m, :rosen, 10, rosen, autodiff=true)")
julia_command("JuMP.setNLobjective(m, :Min,
Expr(:call, :rosen, [x[i] for i=1:10]...))")
Solve this model problem and extract, for instance, the 10th component of the solution.
julia_command("sol = solve(m);")
## This is Ipopt version 3.12.4, running with linear solver mumps.
## NOTE: Other linear solvers might be more efficient
## (see Ipopt documentation).
## [...]
## EXIT: Optimal Solution Found.
Finally we copy the solution, i.e. the minimum found, over to R and see that the last value x[10] is not zero, as that is claimed in R by the optim solver with method “L-BFGS-B”.
julia_eval("getvalue(x)")
## [1] 0.5000000000 0.2630659929 0.0800311191 0.0165742352 0.0103806763
## [6] 0.0102120052 0.0102084109 0.0102042121 0.0100040851 0.0001000822
Constraits: The ‘NLopt’ package
Appendix
Timing
We want to compare some timings of R and Julia functions and also see how much overhead we get when calling functions in Julia. A suggested test function is ‘trapezoidal integration’, in R available as pracma::trapz. Converting this function to Julia and polish it for JIT compilation, the function could look like:
julia_command("# Trapezoidal integration
function trapz{T<:Number}(x::Array{T,1}, y::Array{T,1})
local n = length(x)
r = zero(T)
if n == 1 return r end
for i in 2:n
@inbounds r += (x[i] - x[i-1]) * (y[i] + y[i-1])
end
r / 2.0
end")
This function is also defined in file miscellaneous and thus already exists in the Julia process. We call it once to kick off JIT compilation.
julia_command("x = collect(linspace(0, pi, 1000));")
julia_command("y = broadcast(sin, x);")
Here collect is used because linspace generates a ‘Range’ object, not a vector. And broadcast is the same as the dot notation sin.(x).
We call trapz() one time to initiate JIT compilation and see the result, than utilize the Julia @time macro to see the timing in Julia.
julia_command("trapz(x, y)")
## 1.999998351770852
julia_command("@time [trapz(x, y) for i=1:100];")
## 0.042592 seconds (13.37 k allocations: 710.781 KiB)
In R we could apply the microbenchmark package, here we will be content with the system.time() command.
require(pracma)
x = linspace(0, pi, 1000)
y = sin(x)
system.time( for (i in 1:100) trapz(x, y) )
## user system elapsed
## 0.012 0.005 0.017
Now compare this with a test that includes all the overhead for calling the Julia function from R and the get the vectors back from R.
julia_assign("xx", x)
julia_assign("yy", y)
system.time( for (i in 1:100) julia_call("trapz", x, y) )
## user system elapsed
## 0.040 0.000 0.040
system.time( for (i in 1:100) julia_command("trapz(xx, yy);") )
## user system elapsed
## 0.045 0.000 0.045
A slightly better approach might be to use the RObject function which generates a simple wrapper of a Julia object in R.
xx <- JuliaObject(x)
yy <- JuliaObject(y)
system.time( for (i in 1:100) julia_call("trapz", xx, yy) )
## user system elapsed
## 0.042 0.000 0.042
The overhead is considerable which was to be expected.